Robotics / Embodied AI
Dog-Bot Quadruped Robot
CLIENT — React AI (in-house) — sold under the React Robotics brand
A lightweight, agile quadruped robot platform built for in-house research into embodied AI — how AI systems perceive, interact with and navigate the real world. It was later offered as a product under the React Robotics brand, aimed at fellow AI researchers.
The challenge
React AI needed a physical platform to research how AI systems could interact with and navigate real-world environments, with all their inherent complexity and unpredictability.
Our approach
Developed across four iterations — Prototype, YoYo, Tango and Gyro — advancing from basic walking and trotting to navigating a live London construction site carrying industrial scanning equipment, with a ROS/URDF software stack and simulation alongside the real hardware.
Results
Tango was given a home at Imperial College London's Robot Intelligence Lab; Gyro was demonstrated with Lenovo at Autodesk University in Las Vegas; and Gyro was trialled on a London high-rise building site equipped with a Faro industrial scanner. The URDF model was open-sourced on GitHub and the CAD files published on Hackaday.
Technologies
- ROS
- URDF
- Simulation
- Robotics
- Embedded
DogBot began as an in-house platform for building AI systems that could interact with the real world — a way of researching embodied AI — before being offered as a product, under the React Robotics brand, aimed initially at fellow AI researchers. It’s no longer on the market: React AI is now focused on software and the opportunities of the latest AI developments.
Designed and built in-house
DogBot was engineered from the ground up — we did both the mechanical design and the electronics ourselves.
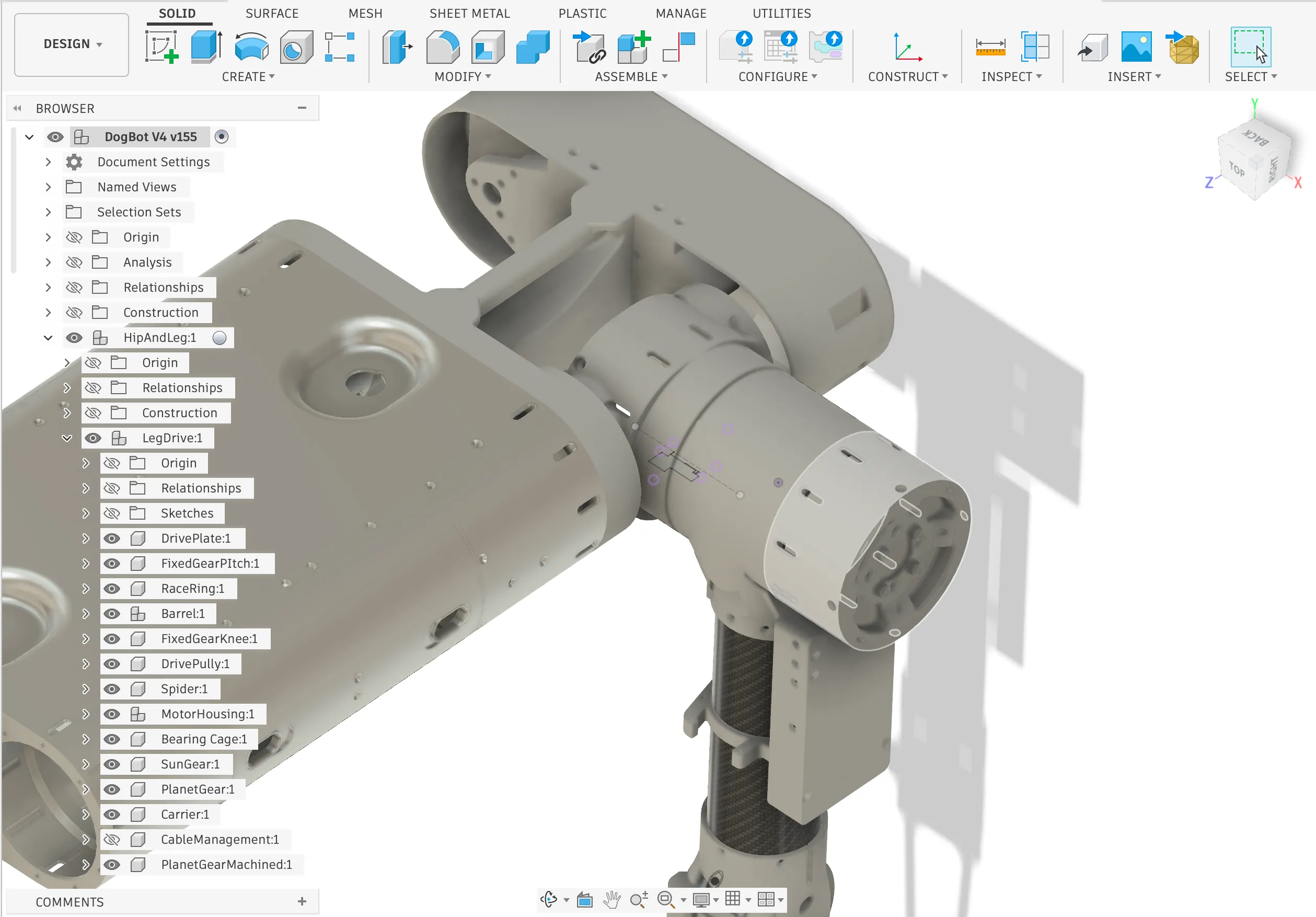
The legs, joints and custom gearboxes were modelled in CAD, designed for a lightweight, agile platform that could be machined and assembled in-house.
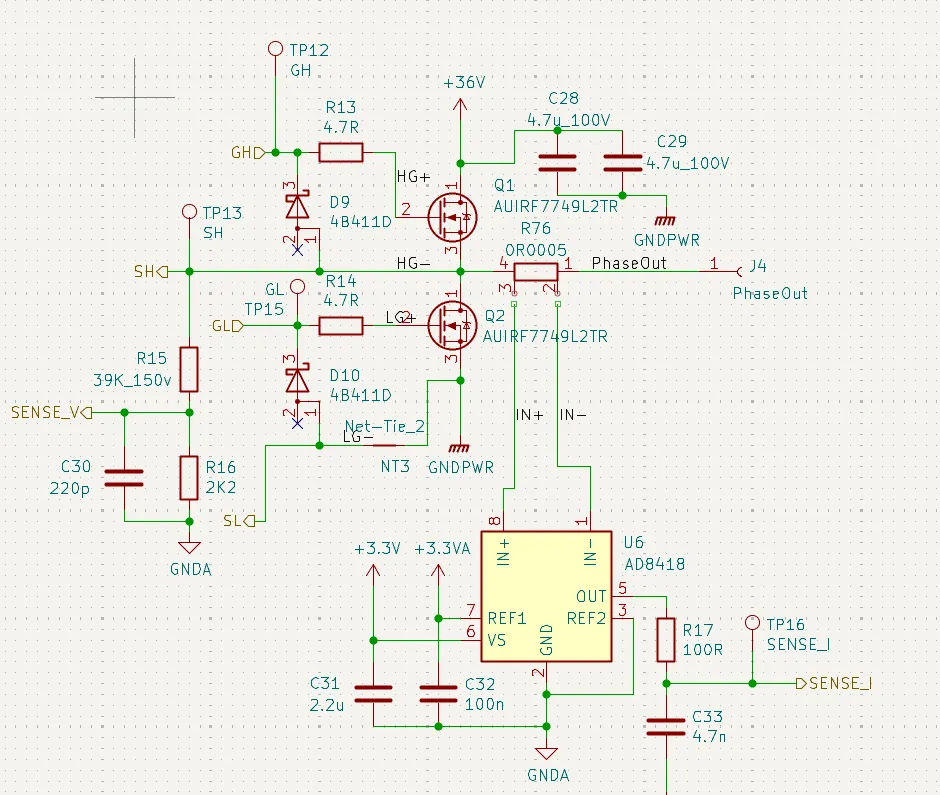
We designed the electronics too — including custom motor-driver and current-sensing boards to drive the joints precisely and feed back into the control system.
Meet the DogBots
We built four generations, each a step up in capability.
 Prototype — the first DogBot didn’t even have a name.
Prototype — the first DogBot didn’t even have a name.
 YoYo — the first ‘proper’ DogBot, able to walk and trot.
YoYo — the first ‘proper’ DogBot, able to walk and trot.
 Tango & Gyro — the production iterations that went out into the world.
Tango & Gyro — the production iterations that went out into the world.
From the lab to the real world

In academia. Tango was given a new home at the Robot Intelligence Lab at Imperial College London, helping push forward the boundaries of robotic control.

On display. Our partners at Lenovo took Gyro and the team to show off at Autodesk University in Las Vegas.

In the real world. Our aim was a robot that could navigate real-world environments with all their messiness and unpredictability. We took Gyro to a high-rise building site in London and put it through its paces carrying an industrial scanner from our partners at Faro.
A simulated twin

Alongside the hardware we maintained a simulated DogBot, so control approaches could be developed and tested in a virtual environment before running on the real robot.
Open-source legacy
We love open source at React AI, so when we moved on from DogBot we left something behind: a URDF model on GitHub, so anyone can drop a DogBot into a simulated environment, and the CAD files and supporting materials on Hackaday, so you can try building your own.

Where are they now? Tango is still at Imperial College. After one of our home offices flooded in 2022, YoYo and Gyro were relocated during the refurbishment to their current spots — dangling from the ceiling.